Code of Path Planning based on Artificial Potential Field Method is Published on Github
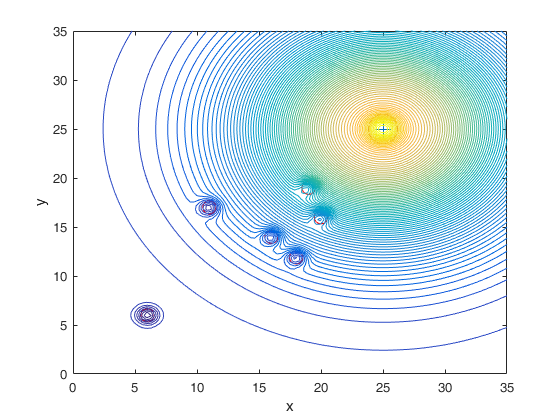
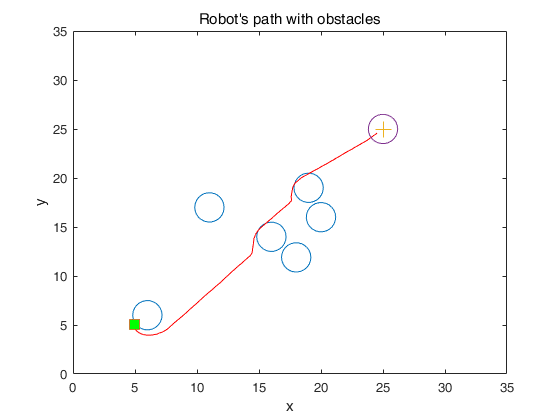
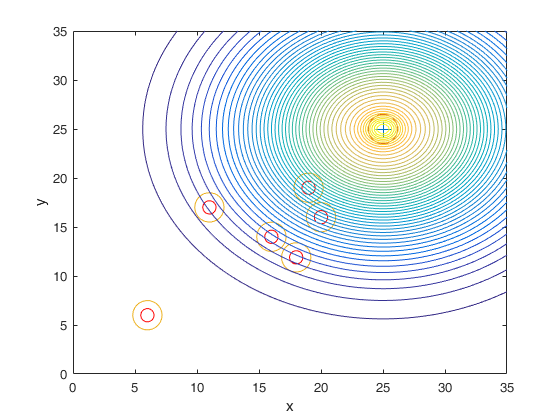
MATLAB Code of Artificial Potencial Field Method for Robot Path Planning
Authors: Xin Li
Email: lixin850224@163.com
Shanghai Maritime University
Code of Path Planning based on Artificial Potential Field Method is Published on Github
MATLAB Code of Artificial Potencial Field Method for Robot Path Planning
Authors: Xin Li
Email: lixin850224@163.com
Shanghai Maritime University