前言
水下机器人技术不断发展,应用不断增加,仿生机器鱼作为水下机器人中的一种,获得越来越多的关注。仿生机器鱼同时作为一种仿生学的产物,具有很多先天的优势。例如,运行噪音小,体积小,灵活性高,可以很好的融入水下生态环境。
一、仿生软体机器鱼的机械设计与材料选择
优良的机械设计是仿生机器人的应用基础。
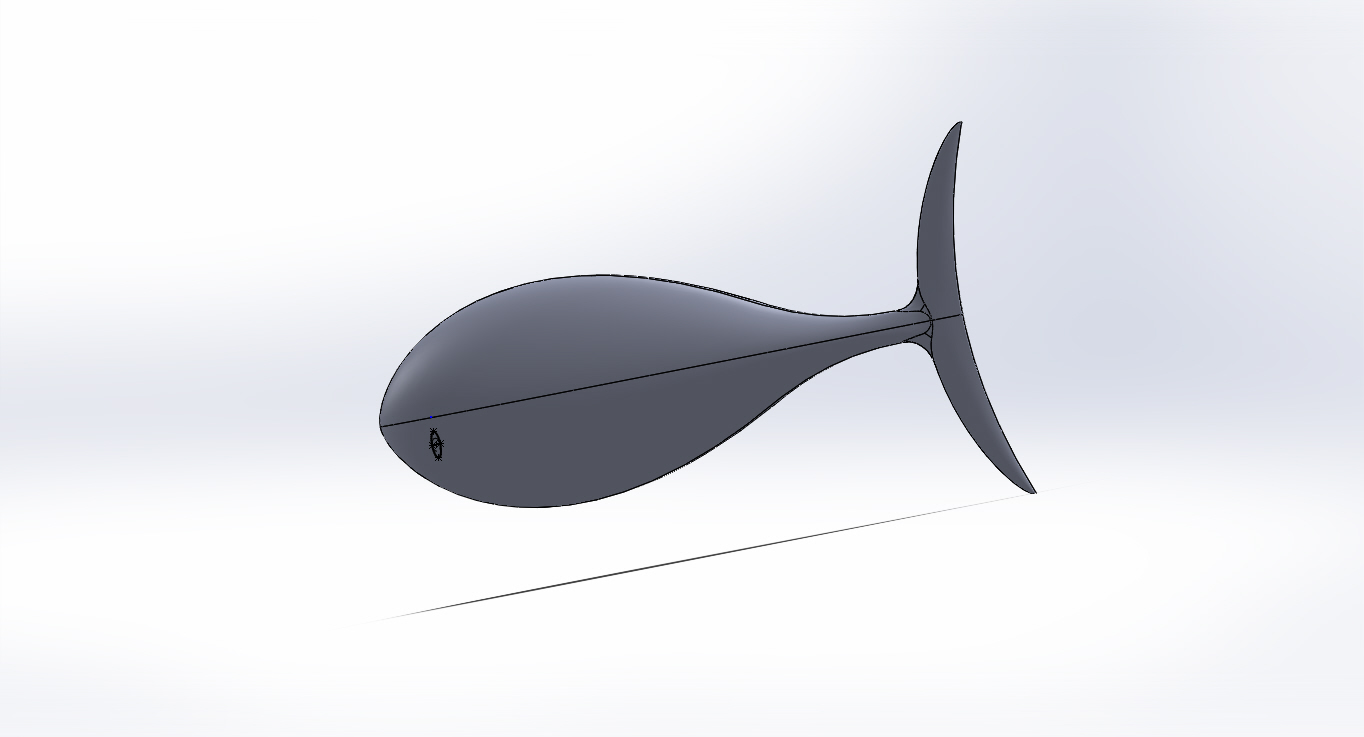
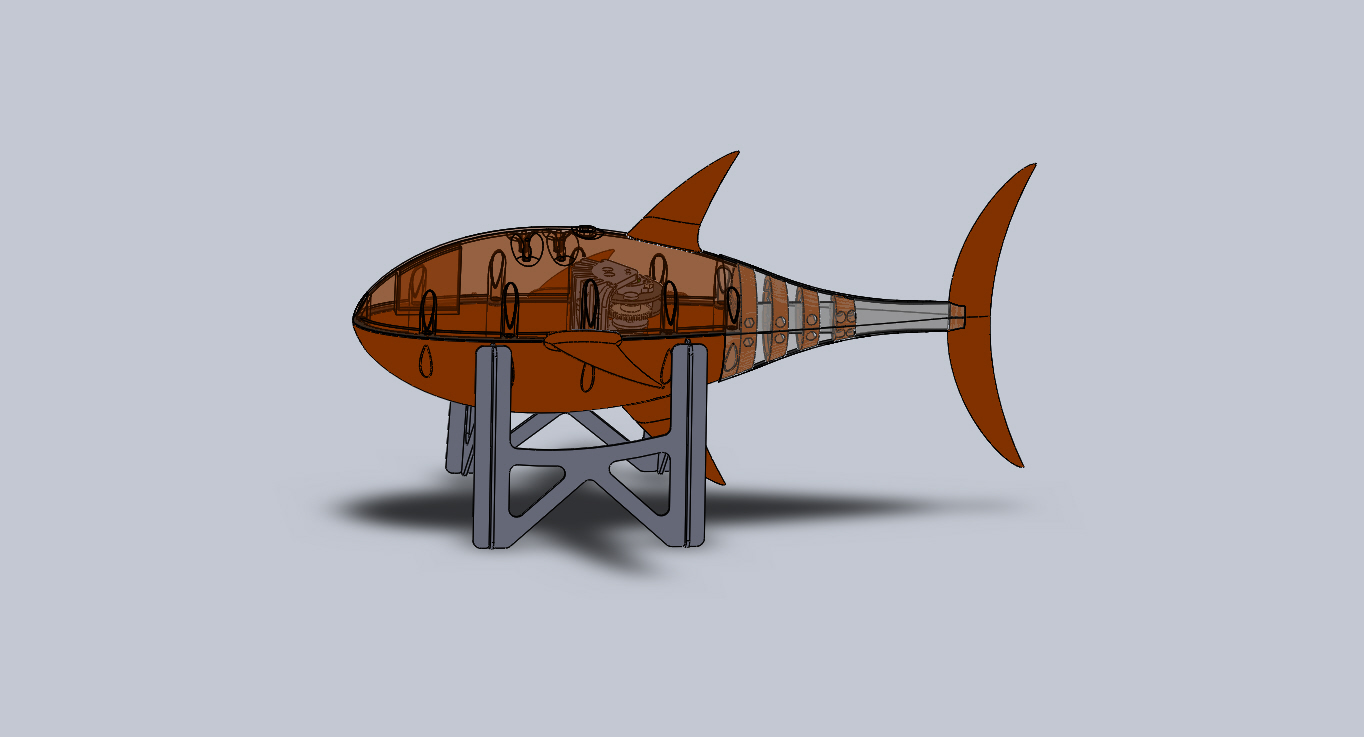
1. 机器鱼主体
鱼体设计应符合流体动力学,结构紧凑合理,防水性能好。
国外某高校研究机构的最新设计,可以扩大或缩小的鱼体。
2. 鱼尾
仿生机器鱼的推进器,早期有采用小型螺旋桨的,目前根据仿生学多采用新型软体材料,是仿生软体机器鱼非常重要的组成部分。
流体动力学,软体材料。
3. 鱼鳍
主要是升降舵的作用。
4. 传感器
姿态(陀螺仪、加速度计,电子罗盘),摄像头等。
5. 附属结构
其他传感器接口等。
二、仿生软体机器鱼的电控设计
1. 控制系统的硬件组成
随着控制算法越来越复杂,人工智能算法的应用,电控模块多可采用嵌入式系统,运行嵌入式Linux,如BeagleBone Black, Raspberry Pi等微型电脑。
控制模式一般为:上位机 <-- 嵌入式微控制器- -> 执行机构
考虑到机器鱼的特殊性,通讯模式一般采用水面WiFi,某些应用中采用声学;
水下可以用惯导;
传感器和照明等设备也必不可少。
1 | \\ Sound Control |
2. 人工智能算法
优良的算法及其应用是仿生机器鱼的灵魂。
机器鱼水下环境信息的获取主要是摄像头和红外避障传感器。因此,我们采用机器视觉方法来获取环境信息,指导机器鱼的运行。针对仿生软体机器鱼的特点,采用某种人工智能\机器学习方法。
总结
本文仅仅简单介绍了仿生机器鱼的设计和应用,并提供模型供有兴趣的小伙伴参考。